RoboRacer(F1TENTH) (roboracer.or.kr) is a standardized research platform that scales down and refines the development pipeline of real autonomous vehicles to enable reproduction in research and educational settings.
This platform is not a simple small-scale RC car but a scaled-down version of a complete autonomous driving system that includes all of the following elements:
- High-precision LiDAR sensor-based perception
- Real-time computation (embedded computing)
- Differentiable dynamics-based control
- Path planning and optimization
- Safety assessment and verification (formal verification)
RoboRacer has an experiment-friendly structure where researchers can immediately verify algorithm changes through actual driving results, making it a general benchmark platform for autonomous driving research adopted by universities, research institutes, and companies worldwide.
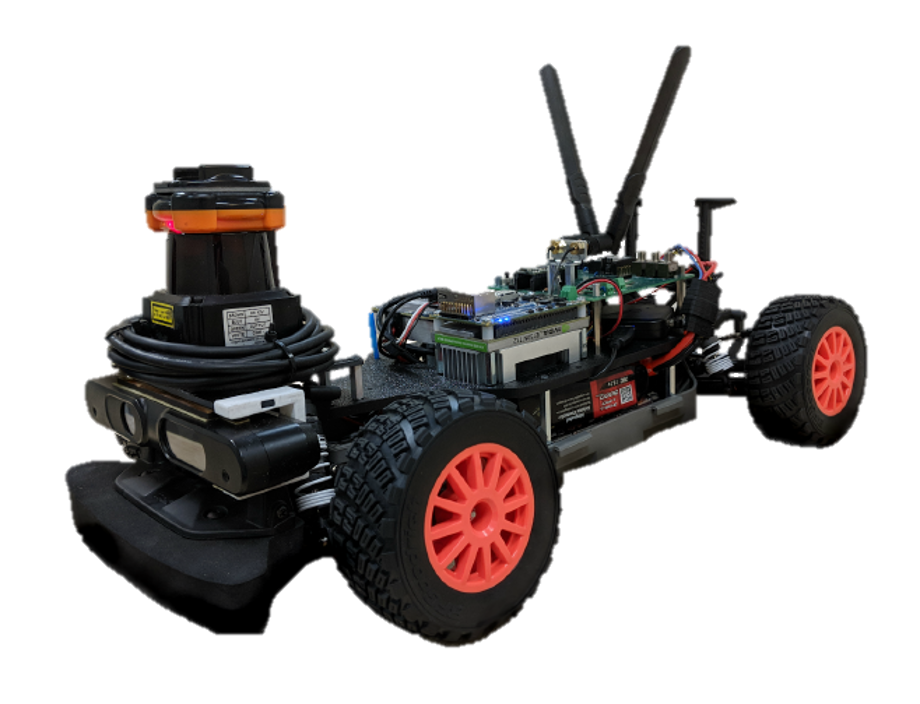
F1TENTH RoboRacer Platform
Features and Performance of the RoboRacer Platform
(1) Precision Sensor and Dynamics-Based Structure
- Application of Ackermann or track-based dynamics identical to real vehicles
- Clear implementation of vehicle dynamics characteristics such as tire friction, cornering, oversteer/understeer
- 2D LiDAR: 270°+ FOV, 0.25° resolution, approximately 40Hz scan frequency
- Real-time application of advanced algorithms such as SLAM, ICP, NDT
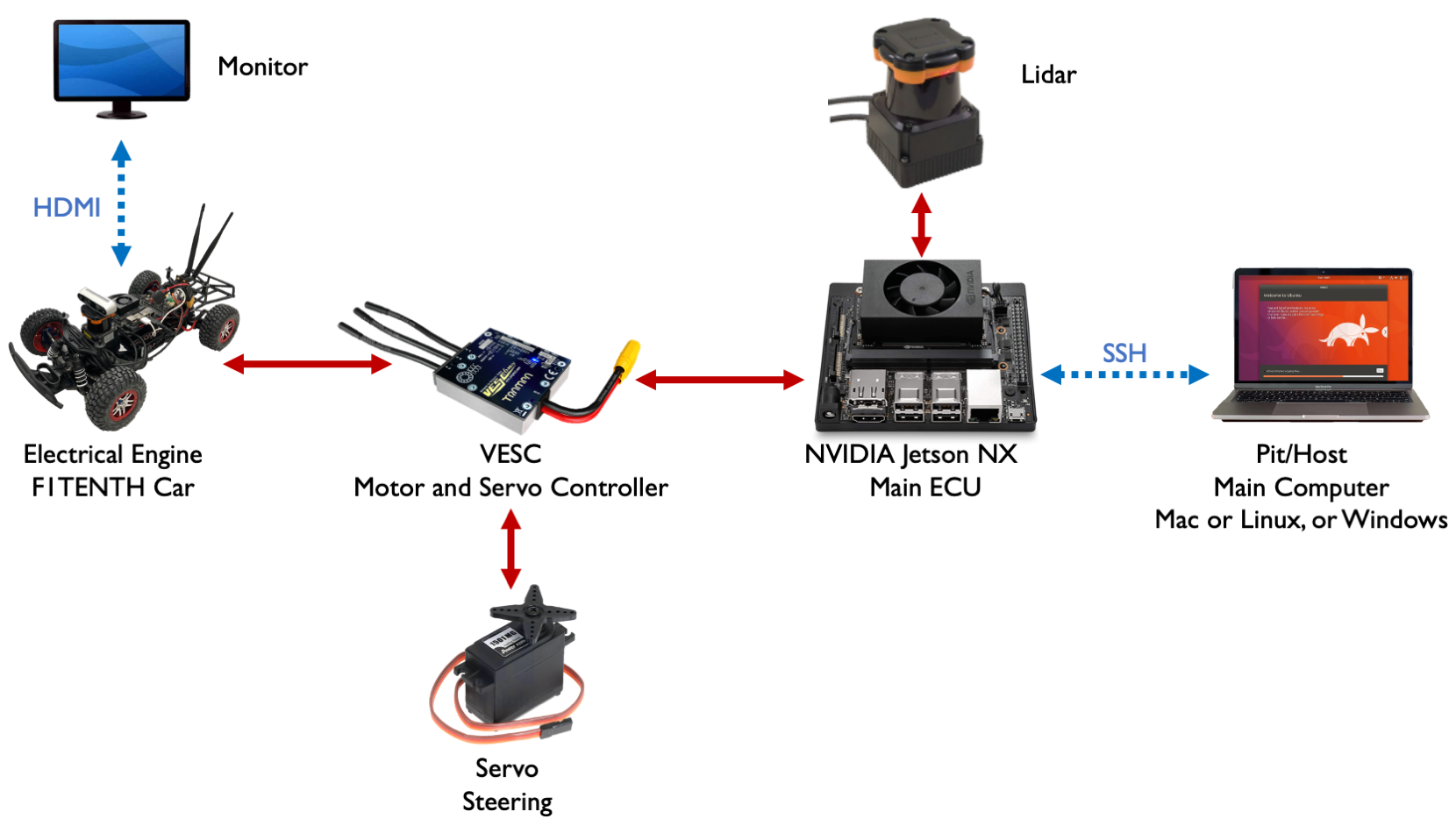
(2) High-Performance Embedded System
- High-performance computing based on NVIDIA Jetson Xavier/Orin or Intel NUC
- Use of ROS2 communication structure ensures structural consistency with industrial robot systems as well as researchers and students
- Stable maintenance of control cycle at 20–50Hz enables high-speed racing
(3) Complete Simulation–Reality Compatibility
- Support for F1TENTH Gym (PyBullet), Gazebo, and NVIDIA Isaac Sim
- Sim2Real research using Domain Randomization
- Automatic compatibility between simulator and real vehicle code through identical ROS interface
(4) Practical Performance for Racing
- Capable of driving at maximum speed of approximately 5–10 m/s
- Clear observation of control algorithm performance differences in indoor cornering, rapid acceleration, and emergency braking
- Reproduction of oversteer/understeer phenomena enables high-speed control experiments
RoboRacer Racing Environment
RoboRacer Competitions
RoboRacer competitions are not simple speed races but international research competitions that comprehensively evaluate the quality of autonomous driving algorithms.
Competitions test the following elements in detail:

RoboRacer Korea 2023
(1) Time-Trial Race
- Quality of optimal path generation and speed profiles
- Ability to design control algorithms that understand vehicle dynamics
- SLAM drift correction and stability
(2) Head-to-Head Race
- Strategic driving considering opponent vehicle behavior
- Collision risk management (TTC-based safety assessment)
- Research on game-theoretic interaction models
(3) Safety & Reliability Challenge
- Emergency braking (AEB) performance for sudden obstacle appearance
- Safe control capability at excessive speed and angular velocity
- Evaluation of whether the system safely converges even in error-accumulating environments
(4) SLAM / Perception Challenge
- LiDAR scan matching accuracy
- Localization stability in indoor and dynamic environments
- Multi-frame tracking optimization
These competitions function as a research, education, and industry verification platform, and in Korea, RoboRacer Korea regularly hosts competitions to expand the ecosystem.
Research Enabled by the RoboRacer Platform
RoboRacer is not a simple educational kit but is widely used as a testing ground for cutting-edge AI and robotics research.
(1) Perception
- LiDAR point cloud segmentation / clustering
- Scan-to-map localization (enables lightweight research such as ICP, NDT, Fast-LIO2)
- Range image-based neural perception research
- Tracking-by-detection / end-to-end BEV model experiments
(2) Path Planning
- Optimal racing line generation for high-speed racing
- Frenet Frame-based speed–position optimization
- Sampling-based planners (RRT*, Hybrid A*) + smoothing
- Dynamic obstacle avoidance and safe reachable tube generation
(3) Control
- Pure Pursuit, Stanley, PID
- MPC (MPC-LQR, LMPC, Koopman-based MPC)
- Vehicle dynamic model identification (friction coefficient estimation, etc.)
(4) Reinforcement Learning (RL)
- Off-policy RL (SAC, TD3)-based driving policy learning
- On-policy RL (PPO, TRPO)-based racing strategies
- Safe RL application (Constraint-aware RL, Lagrangian RL, Shielded RL)
- Domain Randomization / adversarial training for Sim2Real gap reduction
(5) Safety & Formal Methods
- Model checking-based safety-guaranteed control
- Automatic speed limit calculation based on reachable sets
- Responsibility-sensitive safety (RSS) model application experiments
- Benchmark construction for quantifying crash-avoidance performance
(6) Integrated AI for High-Speed Racing
- World Model-based predictive control (Dreamer, ViT-based latent dynamics)
- End-to-End neural control
- Multi-sensor fusion (LiDAR + IMU + wheel odometry)
- Self-supervised trajectory prediction
RoboRacer has the advantage that experimental costs are very low due to its small and fast platform, allowing direct verification of even high-risk scenarios.
Research Focus at AiX Lab
RL-based Control Synthesis & Dynamic Lookahead Computation
At AiX Lab, we are advancing the following frameworks using the RoboRacer platform.
(1) Reinforcement Learning-Based Control Synthesis
AiX Lab is building learning-based controllers that go beyond the limitations of existing controllers (Pure Pursuit, MPC).
Core Research Concepts:
- Embedding model checking-based environmental constraints (safety constraints) into the RL learning process
- Real-time calculation of reachable tubes / safety envelopes
- Including TTC, accumulated risk, trajectory curvature, etc. in RL reward design
- Policy stability verification through simulator + real-world loop
As a result, the goal is to create a "controller that is fast at high speeds while guaranteeing safety".
(2) Dynamic Lookahead Computation
In Pure Pursuit, lookahead significantly affects performance.
AiX Lab's Goals:
- LiDAR curvature estimation → real-time optimal lookahead calculation
- Mutual optimization between speed profile + lookahead
- Adaptive tuning simultaneously considering vehicle dynamics + track geometry
- Development of structures that learn/optimize lookahead with RL/MPC
This research can be viewed as next-generation Pure Pursuit, aiming to simultaneously satisfy two requirements: minimizing Lap Time + ensuring high-speed stability.