RoboRacer(F1TENTH) (roboracer.or.kr)는 실제 자율주행차의 개발 파이프라인을 축소·정제하여 연구·교육 현장에서 재현할 수 있도록 만든 표준화된 연구 플랫폼입니다.
본 플랫폼은 단순한 소형 RC 자동차가 아니라 아래 요소들을 모두 포함하는 완전한 자율주행 시스템의 축소판입니다:
- 고정밀 LiDAR 센서 기반 인지(perception)
- 실시간 계산(embedded computing)
- 미분 가능한 동역학 기반 제어(control)
- 경로 계획과 최적화(planning & optimization)
- 안전성 평가와 검증(formal verification)
RoboRacer는 연구자가 알고리즘을 변경하면 즉각 실제 주행 결과로 확인할 수 있는 실험 친화적 구조를 갖고 있어 전 세계 대학·연구소·기업에서 자율주행 연구의 일반적 벤치마크 플랫폼으로 채택되고 있습니다.
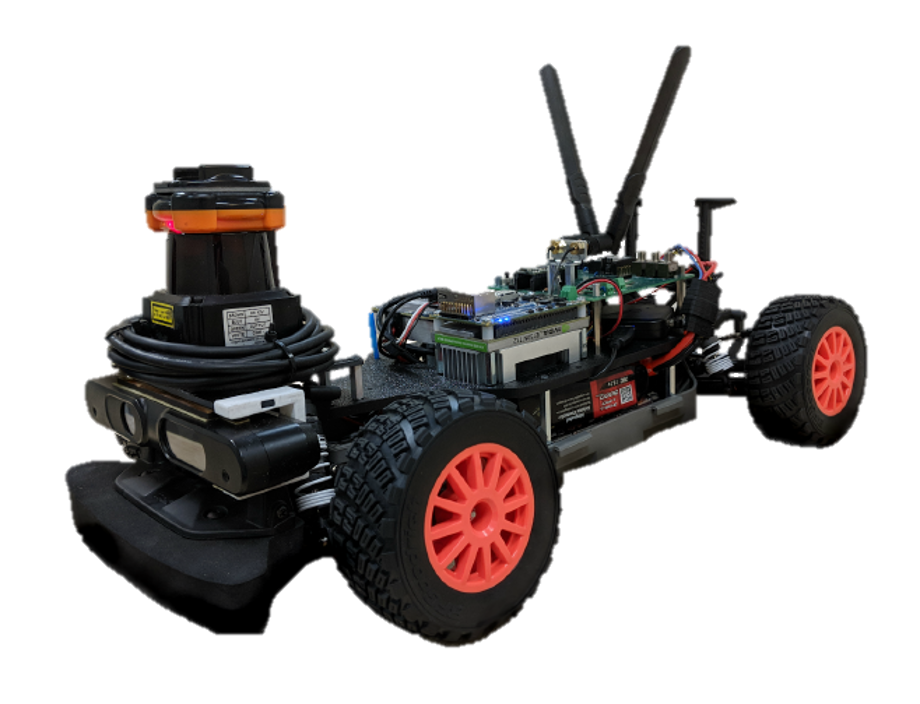
F1TENTH RoboRacer Platform
RoboRacer 플랫폼의 특징과 성능
(1) 정밀 센서·동역학 기반 구조
- 실제 차량과 동일한 Ackermann 또는 트랙 기반 동역학 적용
- 타이어 마찰, 코너링, 과·부조향 등 차량 동역학 특성을 명확히 구현
- 2D LiDAR: 270° 이상 FOV, 0.25° 해상도, 약 40Hz 스캔 빈도 제공
- SLAM·ICP·NDT 등 고급 알고리즘도 실시간 적용 가능
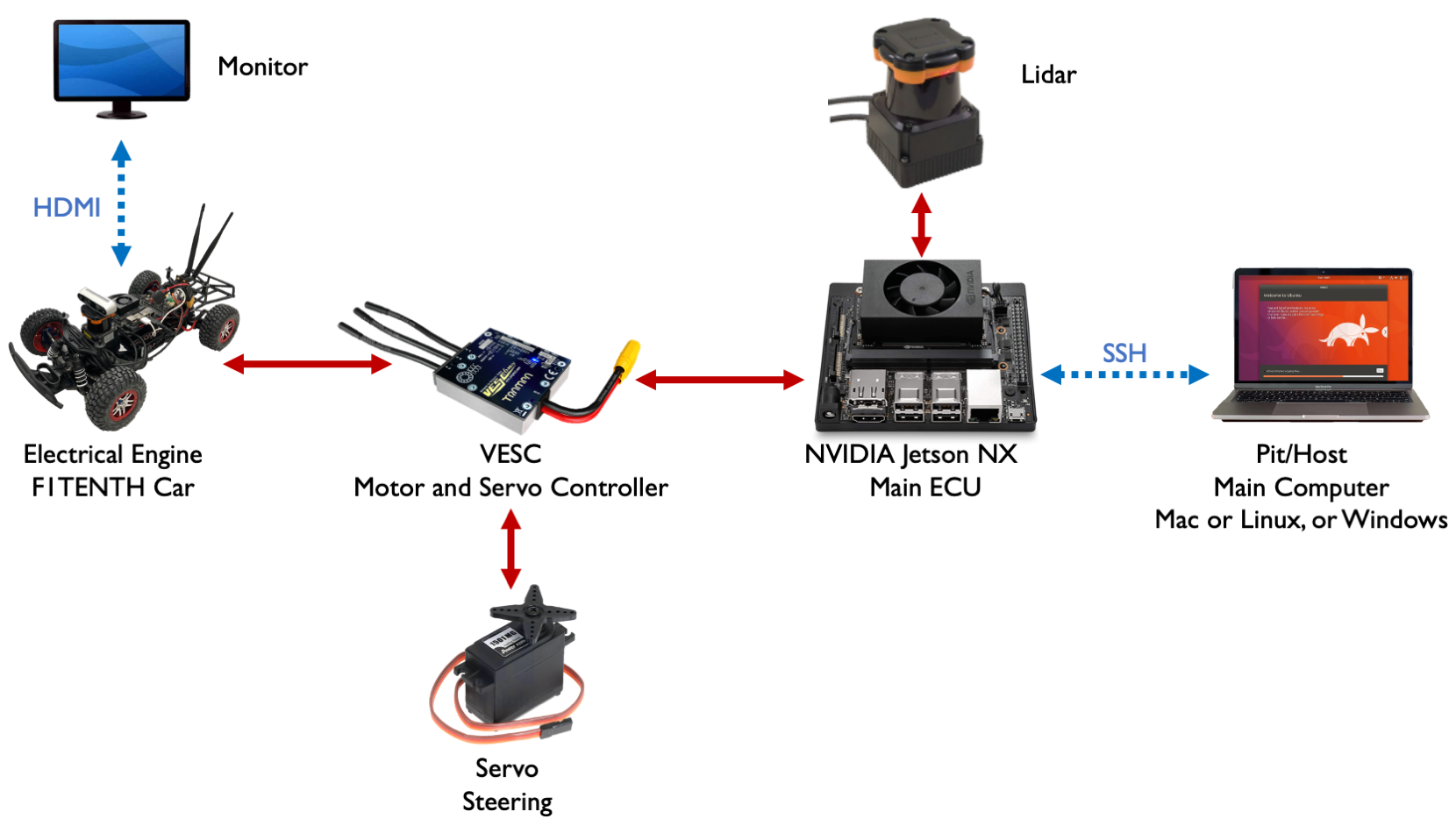
(2) 고성능 임베디드 시스템
- NVIDIA Jetson Xavier/Orin 또는 Intel NUC 기반 고성능 연산
- ROS2 통신 구조를 사용하여 연구자·학생뿐 아니라 산업용 로봇 시스템과도 구조적 일관성 확보
- Control cycle 20–50Hz 안정 유지로 고속 레이싱이 가능
(3) Simulation–Reality 완전 호환성
- F1TENTH Gym(PyBullet), Gazebo, NVIDIA Isaac Sim 모두 지원
- Domain Randomization을 활용한 Sim2Real 연구 수행 가능
- 동일 ROS 인터페이스로 시뮬레이터와 실차 코드가 자동 호환
(4) 레이싱을 위한 실제적 성능
- 최대 약 5–10 m/s 속도로 주행 가능
- 실내 코너링·급가속·급제동에서도 제어 알고리즘 성능 차이가 명확히 관찰됨
- 오버스티어/언더스티어 현상까지 재현되므로 고속 제어 실험이 가능
RoboRacer Racing Environment
RoboRacer 경기
RoboRacer 경기는 단순한 속도 경쟁이 아니라 자율주행 알고리즘의 종합적인 품질을 평가하는 국제 연구 대회입니다.
경기는 다음 요소들을 상세하게 시험합니다:

RoboRacer Korea 2023
(1) Time-Trial Race
- 최적 경로 생성 및 속도 프로파일의 품질
- 차량 동역학을 이해한 제어 알고리즘 설계 능력
- SLAM drift 보정 및 안정성
(2) Head-to-Head Race
- 상대 차량의 행동을 고려한 전략적 주행
- 충돌 위험 관리(TTC 기반 안전 판단)
- 게임 이론적 상호작용 모델 연구 가능
(3) Safety & Reliability Challenge
- 급작스러운 장애물 출현에 대한 긴급 제동(AEB) 성능
- 과도한 속도·회전 각속도에서의 안전 제어 능력
- 오차 누적 환경에서도 시스템이 안전하게 수렴하는지 평가
(4) SLAM / Perception Challenge
- LiDAR scan 정합 정확도
- 실내·동적 환경에서 Localization의 안정성
- multi-frame tracking 최적화
이 대회는 연구·교육·산업 검증 플랫폼으로서 기능하며, 국내에서는 RoboRacer Korea가 정기 대회를 개최하여 생태계를 확대하고 있습니다.
RoboRacer 플랫폼으로 수행 가능한 연구
RoboRacer는 단순한 교육용 키트가 아니라, 최신 AI·로보틱스 연구의 실험 장(實驗場)으로 널리 사용되고 있습니다.
(1) 인지(Perception)
- LiDAR point cloud segmentation / clustering
- scan-to-map localization (ICP, NDT, Fast-LIO2 등 경량화 연구 가능)
- range image 기반 neural perception 연구
- tracking-by-detection / end-to-end BEV 모델 실험
(2) 경로 계획(Path Planning)
- 고속 레이싱용 최적 레이싱 라인 생성
- Frenet Frame 기반 속도–위치 최적화
- 샘플링 기반 플래너(RRT*, Hybrid A*) + smoothing
- 동적 장애물 회피 및 안전한 reachable tube 생성
(3) 제어(Control)
- Pure Pursuit, Stanley, PID
- MPC(MPC-LQR, LMPC, Koopman-based MPC)
- Vehicle dynamic model identification(마찰계수 추정 등)
(4) 강화학습(RL)
- Off-policy RL(SAC, TD3) 기반 주행 정책 학습
- On-policy RL(PPO, TRPO) 기반 레이싱 전략
- Safe RL(Constraint-aware RL, Lagrangian RL, Shielded RL) 적용
- Sim2Real Gap 감소를 위한 Domain Randomization / adversarial training
(5) 안전성 검증(Safety & Formal Methods)
- 모델체킹 기반 안전성 보증 제어
- Reachable set 기반 속도 제한 자동 계산
- 보험수리 모델(RSS) 적용 실험
- Crash-avoidance 성능을 정량화하는 벤치마크 구축
(6) 고속 레이싱을 위한 통합 AI
- World Model 기반 예측 제어(Dreamer, ViT-based latent dynamics)
- End-to-End neural control
- Multi-sensor fusion(LiDAR + IMU + wheel odometry)
- Self-supervised trajectory prediction
RoboRacer는 작고 빠른 플랫폼 덕분에 실험 비용이 매우 낮아, 고위험 시나리오까지 직접 검증할 수 있다는 장점이 있습니다.
AiX Lab이 집중하는 연구
RL-based Control Synthesis & Dynamic Lookahead Computation
AiX Lab은 RoboRacer 플랫폼을 활용해 다음과 같은 프레임워크를 발전시키고 있습니다.
(1) 강화학습 기반 제어 합성 (RL-based Control Synthesis)
AiX Lab은 기존 제어기(Pure Pursuit, MPC)의 한계를 넘어서는 학습 기반 제어기를 구축하고 있습니다.
핵심 연구 개념:
- 모델체킹 기반 환경 제약(safety constraints)을 RL 학습 과정에 내재
- reachable tube / safety envelope을 실시간 계산
- RL reward 설계에 TTC·accumulated risk·trajectory curvature 등을 포함
- simulator + real-world loop를 통한 정책 안정성 검증
결과적으로, "고속에서 빠르면서도 안전을 보장하는 제어기"를 만드는 것이 목표입니다.
(2) Dynamic Lookahead Computation
Pure Pursuit에서 lookahead는 크게 성능을 좌우합니다.
AiX Lab의 목표:
- LiDAR curvature estimation → 실시간 optimal lookahead 산출
- speed profile + lookahead 간의 상호 최적화
- vehicle dynamics + track geometry를 동시에 고려한 adaptive tuning
- RL/MPC로 lookahead를 학습/최적화하는 구조 개발
이 연구는 next-generation Pure Pursuit으로 볼 수 있으며, Lap Time 최소화 + 고속 안정성 확보라는 두 요구를 동시에 만족시키는 것을 목표로 합니다.